Jos olet katsellut korkearesoluutioisia HiRISE-kuvia Mars Reconnaissance Orbiter -tapahtumasta tai jos sinulla on ollut mahdollisuus tutustua uuteen Google Marsiin, tiedät, että Mars on täynnä kraattereita, vuoria, sonnia ja kaikenlaisia mielenkiintoisia - ja vaarallisia - maastoja . Tällaiset alueet, joilla on kerrostettuja kerrostumia, sedimenttejä, murtumia ja vaurioita, ovat vain tyyppisiä paikkoja etsiä Marsiin tuotettavien metaanilähteiden lähteitä. Mutta on liian riskialtista lähettää nykyinen kiskotyyli, mukaan lukien vuoden 2011 Mars Science Laboratory (MSL), petolliseen maastoon. Mutta JPL: n insinöörit yhdessä Kalifornian teknillisen instituutin opiskelijoiden kanssa ovat suunnitelleet ja kokeilleet monipuolisen, pienimassarobotin, joka voitaisiin lisätä MSL: n kaltaisille suuremmalle roverille, joka voi räntää kallioita, matkustaa ketterästi jyrkän ja kivisen maaston yli ja tutkia syvät kraatterit.
Tämä protelityyppi, nimeltään Axel, voisi auttaa tulevia robotti-avaruusaluksia tutkimaan paremmin vieraita maailmoja, kuten Mars. Maapallolla Axel saattaa auttaa etsintä- ja pelastustoimenpiteissä.
"Axel laajentaa kykyämme tutkia maastoja, joita emme ole aiemmin voineet tutkia, kuten syviä kraattereita, joissa on pystysuoraan kalteva otsikko", sanoi Axelin päätutkija, Issa A. D. Nesnas JPL: n robottiikka- ja liikkuvuusosasta. ”Koska Axel on suhteellisen vähän massaa, operaatio voi kuljettaa useita Axel-rovereita. Se antaisi meille mahdollisuuden olla aggressiivisempi tutkittavan maaston suhteen, pitäen samalla kokonaisriskin hallittavana. "
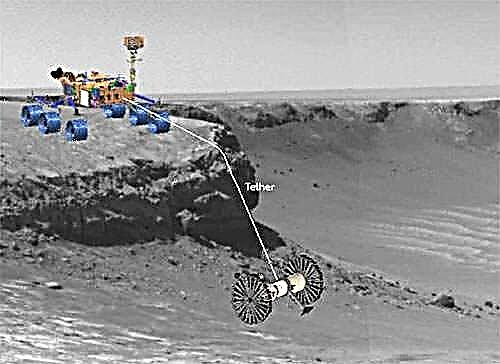
Nesnas sanoi, että Axel on kuin yo-yo - se on kiinnitysnauhassa, joka on kiinnitetty suurempaan roveriin, ja se voi mennä ylös ja alas kraatterien, kanjoneiden ja kaivojen sivuille tutkimalla alueita, jotka eivät ole turvallisia muille roverille.

Axelin yksinkertainen ja tyylikäs muotoilu, joka voi toimia sekä ylösalaisin että oikealla puolella ylös, käyttää vain kolmea moottoria: yksi kummankin pyörän ohjaamiseen ja kolmas vivun ohjaamiseen. Vivussa on kauha kuun tai planeetta-aineiston keräämistä tutkijoiden tutkittavaksi. Lisäksi se säätää robotin kahta stereokameraa, jotka voivat kallistua 360 astetta.

Axelin lieriömäisessä rungossa on laskenta- ja langattomat viestintäominaisuudet sekä inertia-anturi toimimaan itsenäisesti. Se urheilee myös kiinnitysnauhaa, jonka Axel voi kelata laskeutua suuremmalta laskeutumis-, rover- tai ankkuripaikalta. Rover voi käyttää erilaisia pyörätyyppejä, suurista taitettavista pyöristä puhallettaviin, jotka auttavat roveria sietämään kovaa laskua ja käsittelemään kivistä maastoa.
Axel on ollut kehitystyössä vuodesta 1999, ja Caltechin, Purduen yliopiston ja Arkansasin teknillisen yliopiston opiskelijat ovat vuosien ajan tehneet yhteistyötä JPL: n kanssa tämän monipuolisen roverin kehittämiseksi.
Lisätietoja Axelista on JPL: n Axel-sivulla ja Caltechin Axel-verkkosivustolla.