Vaikka jotkut meistä ehkä vain haaveilevat kiinni varpaistamme hiekkaan juuri nyt, Curiosity rover todella tekee niin. Mutta se ei ole lomaa roverille, koska hän on matkalla läpi joitakin hyvin epätavallisia ja silmiinpistäviä hiekkadyynejä Marsilla. Bagnold-dyynikenttä sijaitsee Mt. Sharp - Curiosityn päätavoite tehtävässään - ja tämä on ensimmäinen kerta, kun meillä on ollut tilaisuus tehdä lähikuvatutkimuksia aktiivisista hiekkadyyneistä missä tahansa maapallon lisäksi.
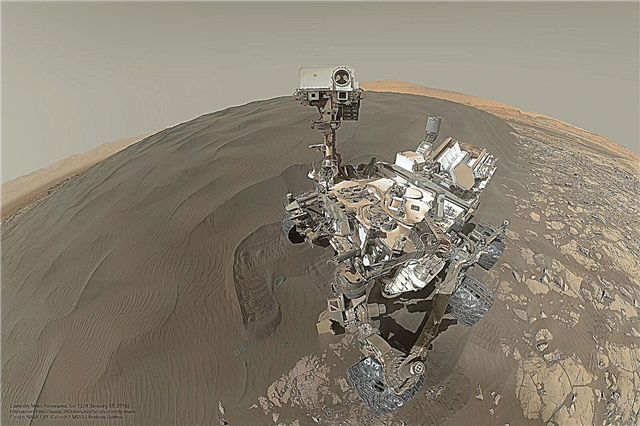
Kiitos Andrew Bodroville, joka jakoi kokoelmansa tästä 57-kuvan mosaiikista "selfie", ja voit leikkiä alla olevan interaktiivisen version avulla nähdäksesi hienoja näkymiä dyynille. Kuvat on ottanut roverin Mars Hand Lens Imager (MAHLI) Sol 1228: lla (19. tammikuuta 2016).
Mars Panorama - Curiosity rover: Marsin aurinkopäivä 1228
Näytetään dyynit SAM: lla
Vaikka rover pysähtyi ottamaan näitä kuvia luodakseen tämän 57-kuvan mosaiikkikuvan "selfie", uteliaisuus on myös ollut aika kiireinen, sekä navigoimalla dyynien läpi että lopettamassa näytteenottoa. Kiehtovasti rover löysi osan hiekasta ja lähetti sen koneen kemian laboratorioon, näytteen analyysi Marsiin (SAM). Tämä on vasta toinen kerta, kun kauhaa käytetään pienten erien toimittamiseen - yleensä noin puolet vauvan aspiriinista - analysoitavaksi; Roverin poraa on käytetty useita kertoja näytteiden saamiseksi.
Curiosity otti ensimmäisen dyyninäytteensä tammikuun 14. päivä, mutta rover kiinni pyörään hetkeksi, raaputtaen sitä pyörällä. "Kulho auttoi meitä luottamaan siihen, että meillä on tarpeeksi hiekkaa siellä, missä kauhaamme, että kauhan polku ei osu maahan hiekan alla", sanoi Michael McHenry, joka on roverisuunnittelija näiden näytteiden keräämiselle.
Minulla oli tilaisuus vierailla JPL: n Curiosityn roverisuunnittelutiimin John Michael Morookianin kanssa noin kaksi viikkoa sitten, ja hän sanoi, että suunnitelmana oli ajaa dyyniin lyhyen matkan päässä, ottaa näytteitä kauhalla ja toimittaa ne kokeet aluksella.
Morookian selitti, että Mars Reconnaissance Orbiter -laitteen HiRISE-kameran kiertoratakuvista joukkue tietää, että dyynien välillä on hyvä polku navigoida, eikä roverin juuttumiseen tai juuttumiseen saa olla vaaraa.
"Aiomme kiertää heitä, polkuja on paljon", hän sanoi. ”Tämä ei ole mahdotonta. Rover on tällä tietyllä paikalla näytteenottoa suunnilleen tammikuun kuukauden ajan, ja nykyinen suunnitelma on kulkea pitkä kilometri, joka kiertää dyynit ja päästä vähemmän aktiivisiin dyyniin, jotka kuuluvat samaan dyynien kenttään. ”
Näytteiden saaminen kauhasta SAM: iin käsittää joukon monikammioisen laitteen monimutkaisia liikkeitä roverin varressa, joka kuljettaa materiaalin seulan läpi, josta seulottiin yli 150 mikronin (0,006 tuuman) hiukkasia; osa seulan läpäisseestä materiaalista pudotettiin laboratorion sisääntuloaukkoihin laitteen ”annostelijasta”.
”Käynnistämme tärinän ja kallistamme kauhaa vähitellen”, Morookian selitti. "Materiaali virtaa kauhan päässä, enemmän virtauksessa kuin kaikki kerralla."
Seulan estämä materiaali kaadetaan maahan.
Ryan Andersonin mukaan Curiosity-tiimistä, sekä Rover Mastcam että MAHLI -kamerat dokumentoivat perusteellisesti scooping-prosessin, ja Mastcam tekee myös havainnointeja scoopingista jäljellä olevien tyhjennyspaalujen suhteen, ja ChemCam ottaa paalujen passiiviset spektrit . Mastcam kuvaa myös dyyniä, jonka nimi on “Hebron” useita kertoja tarkkaillakseen dyynissä tapahtuvia muutoksia roverin ollessa lähellä.
Lisätietoja Curiosityn viimeaikaisesta toiminnasta Martian Chronicles -blogista ja tästä JPL: n artikkelista.
Ja jos ihmettelet, miksi roverin käsivarsi ei näy itsekuvasaiheissa, lue edellinen artikkeli, joka selittää sen täällä.