Seuraava on viimeinen ote uudesta kirjastani, ”Uskomaton tarina avaruudesta: kohtauksen takana katsaus tehtäviin, jotka muuttavat näkemystämme kosmosta”. Kirja on sisälle katsaus useisiin NASA: n nykyisiin robotti-operaatioihin, ja tämä ote on osa 3: sta 3, joka on julkaistu täällä Space Magazine, luvussa 2, ”Marsin kiertäminen uteliaisudella”. Voit lukea osan 1 täältä ja osan 2 täältä. Kirja on saatavana painettuna tai e-kirjana (Kindle tai Nook) Amazon ja Barnes & Noble.
Kuinka ajaa Mars Roveria
Kuinka Curiosity tietää missä ja miten ajaa Marsin pinnan yli? Saatat kuvitella JPL: n insinöörejä joystickillä, jotka ovat samanlaisia kuin kauko-ohjattavissa leluissa tai videopeleissä. Mutta toisin kuin RC-ajo tai pelaaminen, Mars Rover -ohjaimilla ei ole välitöntä visuaalista tuloa tai videonäyttöä nähdäkseen mihin rover menee. Ja aivan kuten laskussa, aina on viive siitä, kun komento lähetetään roverille ja kun se vastaanotetaan Marsille.
"Se ei ajo reaaliaikaisessa interaktiivisessa mielessä viiveen takia", selitti rover-kuljettajien ryhmää johtava John Michael Morookian.
Morookianin ja hänen tiiminsä todellinen toiminimi on "Rover Planners", joka kuvaa tarkalleen mitä he tekevät. Sen sijaan, että "ajettaisiin" rovereita sinänsä; he suunnittelevat reitin etukäteen, ohjelmoivat erikoistuneita ohjelmistoja ja lähettävät ohjeet Curiositylle.
"Käytämme kuvia, jotka on ottanut sen ympäristön rover", sanoi Morookian. ”Meillä on joukko stereokuvia neljästä mustavalkoisesta navigointikamerasta sekä Hazcams (vaarojen välttämiskamerat) -kuvia, joita tukevat MastCamin korkearesoluutioiset värikuvat, jotka antavat meille yksityiskohtia maaston luonteesta eteenpäin ja vihjeitä kivityypeistä ja mineraaleista sivustolla. Tämä auttaa tunnistamaan rakenteita, jotka näyttävät mielenkiintoisilta tutkijoille. "
Kaikkia saatavilla olevia tietoja käyttämällä he voivat luoda maaston kolmiulotteisen visualisoinnin erityisohjelmalla, nimeltään Rover Sequencing and Visualization Program (RSVP).
"Tämä on pohjimmiltaan Marsin simulaattori ja laitamme simuloidun uteliaisuuden kohtauksen kohtaan panoraamakuvan visualisoidaksesi kuinka rover voisi kulkea polullaan", Morookian selitti. ”Voimme laittaa myös stereolaseja, joiden avulla silmämme näkevät kohtauksen kolmiulotteisesti kuin olisimme siellä roverin kanssa.
Virtuaalitodellisuudessa rover-kuljettajat voivat manipuloida kohtausta ja roveria testatakseen kaikki mahdollisuudet, mitkä reitit ovat parhaat ja mitä alueita vältetään. Siellä he voivat tehdä kaikki virheet (juuttua dyyniin, tiputtaa roveria, törmätä isoon kallioon, ajaa lehdeltä) ja täydellistää ajojärjestystä, kun todellinen rover pysyy turvassa Marsilla.
”Tutkijat tarkistavat myös kuvat mielenkiintoisista ominaisuuksista ja neuvottelevat Rover Plannersin kanssa polun määrittelemiseksi. Sitten me kootamme yksityiskohtaiset komennot, jotka ovat tarpeen uteliaisuuden saamiseksi pisteestä A pisteeseen B tuota polkua pitkin ”, Morookian sanoi. "" Voimme sisällyttää myös komennot, joita tarvitaan roverin suunnan saamiseksi yhteydenpitoon sivustoon sen robottivarren avulla. "

Joten joka ilta roveria käsketään sammuttamaan kahdeksan tuntia akkujen lataamiseksi ydingeneraattorilla. Mutta ensin Curiosity lähettää maapallolle tietoja, mukaan lukien kuvat maastosta ja kaikki tieteelliset tiedot. Maapallolla Rover-suunnittelijat ottavat nämä tiedot, tekevät suunnittelutyönsä, suorittavat ohjelmoinnin ohjelmoinnin ja siirtävät tiedot takaisin Marsiin. Sitten Curiosity herää, lataa ohjeet ja asettaa toimimaan. Ja sykli toistuu.
Curiosityllä on myös AutoNav-ominaisuus, jonka avulla kuljettaja voi kulkea alueita, joita joukkue ei ole vielä nähnyt kuvissa. Joten se voisi mennä mäen yli ja alas toiselta puolelta kartoittamattomalle alueelle, kun AutoNav havaitsee mahdolliset vaarat.
"Emme käytä sitä liian usein, koska se on laskennallisesti kallista, mikä tarkoittaa, että roverin toiminta tässä tilassa vie paljon kauemmin", Morookian sanoi. "Usein mielestämme on parempi kauppa tulla vain seuraavana päivänä, katsoa kuvia ja ajaa niin pitkälle kuin pystymme."

Kun Morookian näytti minulle JPL: n roverisuunnitteluryhmien käyttämät eri huoneet, hän selitti, kuinka niiden on toimittava useilla eri aikaväleillä.
"Meillä ei ole vain päivittäinen reittisuunnittelu", hän sanoi, "mutta myös suunnittelemme pitkän kantaman strategista suunnittelua käyttämällä Mars Reconnaissance Orbiter -laitteen HiRISE-kameran kiertoratakuvia ja valitsemaan reittejä kiertoradalta havaittujen ominaisuuksien perusteella. Tiimimme toimii strategisesti ja etsii useita kuukausia parhaiden polkujen määrittelemiseksi. ”
Toinen Supra-Tactical-niminen prosessi näkyy vasta ensi viikolla. Tähän sisältyy tiedesuunnittelijoita, jotka hallitsevat ja tarkentavat toimintotyyppejä, joita rover aikoo tehdä lyhyellä aikavälillä. Koska kukaan joukkueen jäsenistä ei enää elää Marsiajalla, perjantaisin Rover-suunnittelijat laativat suunnitelmat useita päiviä.
"Koska emme työskentele viikonloppuisin, perjantai-suunnitelmat sisältävät useita harrastuksia", Morookian sanoi. "Kaksi rinnakkaista joukkuetta päättää, mitkä päivät rover ajaa ja millä päivinä se suorittaa muita toimintoja, kuten työskennellä robottivarren tai muiden välineiden kanssa."
Viikonlopun aikana roverilta pudottavia tietoja tarkkaillaan kuitenkin, ja jos ongelmia ilmenee, tiimi kutsutaan tekemään tarkempi arviointi. Morookian ilmoitti, että heidän on pitänyt ottaa mukaan viikonlopun hätätiimi useaan otteeseen, mutta toistaiseksi ei ole ollut vakavia ongelmia. "Se pitää meidät kuitenkin varpaissamme", hän sanoi.
Roverilla on joukko reaktiivisia turvallisuustarkastuksia rokerikannen kokonaiskaltevuuden ja pyörien jousitusjärjestelmän nivelten suhteen, joten jos rover menee liian suuren esineen yli, se pysähtyy automaattisesti.
Uteliaisuutta ei rakennettu nopeudelle. Se oli suunniteltu matkustamaan jopa 660 jalkaa (200 metriä) päivässä, mutta se kulkee harvoin niin kaukana Solissa. Vuoden 2016 alkupuolella rover oli ajaa yhteensä noin 7,5 mailia (12 km) Marsin pinnan yli.

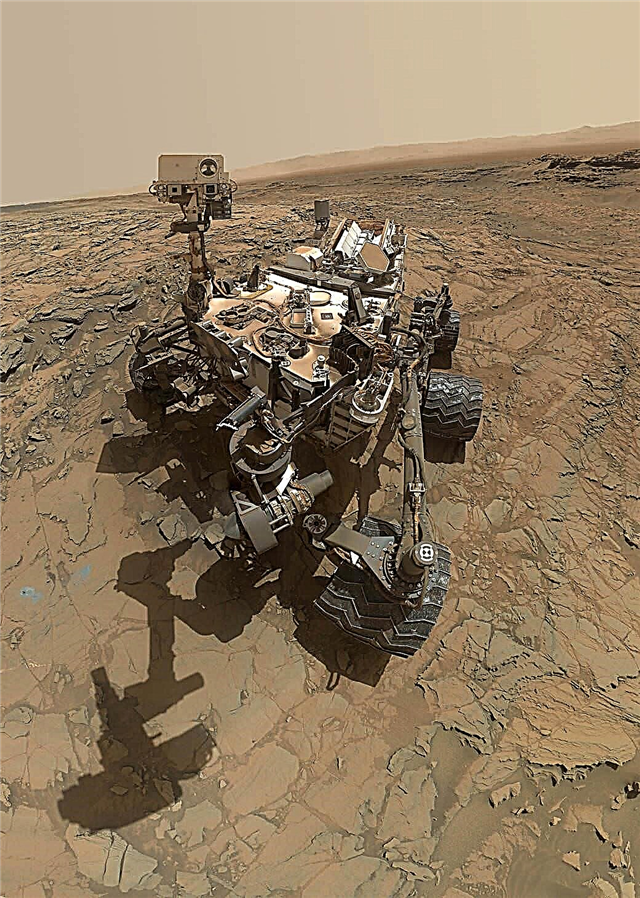
On olemassa useita tapoja määrittää, kuinka pitkälle Curiosity on kulkenut, mutta tarkkaa mittausta kutsutaan 'Visual Odometry'ksi. Curiosity on pyöreissään erikoistunut reikiä Morse-koodikirjaimien muotoon, sanoen' JPL '- nyökkäys kotiin. roverin tiede- ja tekniikkatiimistä - Marsin maaperän yli.
"Visuaalinen matkamittari toimii vertaamalla viimeisintä stereokuvien paria, joka on kerätty suunnilleen joka metri aseman yli", sanoi Morookian. ”Kohtauksen yksittäisiä piirteitä sovitetaan yhteen ja seurataan, jotta saadaan aikaan mitta siitä, kuinka kamera (ja siten rover) on kääntynyt ja kiertynyt kolmiulotteisessa tilassa kahden kuvan välillä, ja se kertoo meille aivan todellisessa mielessä, kuinka pitkälle Curiosity on mennyt .”
Rover-telojen huolellinen tarkastaminen voi paljastaa pyörien vetovoiman ja jos ne ovat luistaneet esimerkiksi korkeiden rinteiden tai hiekkapohjan takia.
Valitettavasti Curiosityn pyörissä on nyt uusia reikiä, joita ei ole tarkoitus olla siellä.
Rover-ongelmat
Morookian ja projektitutkija Ashwin Vasavada ilmaisivat sekä helpotuksen että tyytyväisyyden siihen, että kaiken kaikkiaan - tällä kaudella tehtävässä - Curiosity on melko terve rover. Koko tieteen hyötykuorma toimii tällä hetkellä lähes täydellä kapasiteetilla. Mutta suunnittelutiimi pitää silmällä muutamia asioita.
"Sol 400: n ympärillä huomasimme, että pyörät kuluivat odotettua nopeammin", Vasavada kertoi.

Ja kuluminen ei koostu vain pienistä reikistä; joukkue alkoi nähdä lävistyksiä ja ilkeitä kyyneleitä. Insinöörit tajusivat, että reikiä luovat kovat, rosoiset kivet, joita rover ajoi tuona aikana.
"Emme odottaneet täysin sellaisia" teräviä "kiviä, jotka tekivät vahinkoa", Vasavada sanoi. ”Teimme myös joitain testauksia ja näimme, kuinka yksi pyörä pystyi työntämään toisen pyörän kallioon, mikä vaurioittui entistä pahemmaksi. Ajamme nyt tarkemmin eikä aja niin kauan kuin olemme aiemmin. Olemme pystyneet tasoittamaan vahingot hyväksyttävämmälle tasolle. "
Mission varhaisessa vaiheessa Curiosityn tietokone siirtyi "turvatilaan" useita kertoja, koska Curiosityn ohjelmisto tunnisti ongelman ja vastauksena oli kieltää jatkotoiminta ja soittaa kotiin.
Erikoistunut vikasuojausohjelmisto toimii kaikissa moduuleissa ja instrumenteissa, ja kun ongelma ilmenee, rover pysähtyy ja lähettää 'Tapahtumarekisterit' -nimisen tiedon Maalle. Tietueisiin sisältyy erityyppisiä kiireellisyyksiä, ja vuoden 2015 alussa rover lähetti viestin, jonka pääasiallinen sanoma oli: "Tämä on erittäin, erittäin huonoa." Roverin varren pora oli kokenut sähkövirran vaihtelua - kuten oikosulku.
"Curiosityn ohjelmistolla on kyky havaita oikosulku, kuten kylpyhuoneesi maadoitusvirtakatkaisija", Morookian selitti, "paitsi tämä kertoo, että" tämä on erittäin, erittäin huonoa "sen sijaan, että antaisi sinulle keltaisen valon."
Koska joukkue ei voi mennä Marsiin ja korjata ongelmaa, kaikki korjataan joko lähettämällä ohjelmistopäivityksiä roverille tai muuttamalla toimintatapoja.

"Olemme vain tarkempia nyt, kun käytämme poraa", Vasavada sanoi, "ja älä poraa aluksi täydellä voimalla, vaan aja hitaasti ylös. Se on eräänlainen kuin miten ajamme nyt, inkiväärisemmin, mutta työ saa silti työtä. Se ei ole vielä ollut valtava vaikutus toistaiseksi. "
Poran kevyempi kosketus oli välttämätöntä myös roverin kohtaamille pehmeille kivi- ja hiekkakiveille. Morookian kertoi olevansa huolestunut siitä, että kerrokselliset kivet eivät ehkä pidä kiinni normaalin porausprotokollan pahoinpitelystä, ja niinpä he sääsivät tekniikkaa käyttämään matalimpia ”asetuksia”, jotka edelleen mahdollistavat poran edistyä riittävästi kallioon.
Mutta mahdollisuudet käyttää poraa kasvavat, kun Curiosity alkaa kulkea vuorella. Rover kulkee Vasavada -nimisen ”kohderikkaan, erittäin mielenkiintoisen alueen” läpi, koska tiederyhmä työskentelee sitoakseen yhteen kaiken geologisen kontekstin, jota he näkevät kuvissa.
Tasapainon löytäminen Marsista
Vaikka ohjaaminen Yellowknife Bayssä antoi joukkueelle mahdollisuuden tehdä joitain merkittäviä löytöjä, he tunsivat painetta päästä Mt. Terävä, joten ”ajoi kuin helvetti vuoden”, Vasavada sanoi.
Nyt vuorella on edelleen paine hyödyntää operaatiota parhaiten tavoitteena saada se läpi ainakin neljän erilaisen kallioyksikön - tai kerroksen - läpi Mt. Terävä. Jokainen kerros voi olla kuin luku Marsin historian kirjassa.

“Tutkimalla Mt. Terävä on kiehtovaa ", Vasavada sanoi," ja yritämme ylläpitää sekoitusta todella suurien löytöjen välillä, jotka hidastavat meitä hidastamaan meitä ja nousemasta vuorelle. Tarkka katsominen edessäsi olevaan kallioon tarkoittaa, että et koskaan voi mennä yli katsomaan tuota muuta mielenkiintoista kallioa tuonne. "
Vasavada ja Morookian sanoivat, että haasteena on ylläpitää tätä tasapainoa joka päivä - löytää niin kutsuttu polvi käyrässä tai "makea kohta", joka tarjoaa täydellisen optimoinnin ajon ja pysähtymisen välillä tieteen kannalta.
Sitten on tasapaino välillä lopettaa täydellisen havainnoinnin tekeminen kaikilla instrumenteilla ja tehdä "lentotiede" missä vähemmän intensiivisiä havaintoja tehdään.
"Otamme havainnot voimme ja tuotamme kaikki hypoteesit voimme reaaliajassa", Vasavada sanoi. "Vaikka meillä olisikin 100 avointa kysymystä, tiedämme, että voimme vastata kysymyksiin myöhemmin, kunhan tiedämme, että olemme ottaneet tarpeeksi tietoa."
Curiosityn ensisijainen tavoite ei ole huippukokous, vaan sen sijaan alue, joka on noin 1 300 jalkaa (400 metriä) ylöspäin, josta geologit odottavat löytävänsä rajan kivien välillä, jotka näkivät historian aikana paljon vettä, ja niiden välillä, jotka eivät. Raja antaa käsityksen Marsin siirtymisestä kostealta planeetalta kuivana, ja se täyttää avaimen aukon planeetan historian ymmärtämisessä.

Kukaan ei oikein tiedä kuinka kauan uteliaisuus kestää, tai jos se yllättää kaikkia kuten edeltäjänsä Henki ja Mahdollisuus. Yksi iso muuttuja on saavuttanut yhden vuoden "päätehtävän" Marsissa (kaksi maapallon vuotta) "päätehtävästä" ja nyt laajennetussa tehtävässä. Vaikka käytettävissä oleva teho alkaa vähentyä tasaisesti, sekä Vasavada että Morookian eivät usko, että kyseessä olisi ainakin neljä maapallon vuotta enemmän ja oikealla ”vaalimella” voima voisi kestää kymmenen vuotta tai enemmän.
Mutta he myös tietävät, ettei ole mitään keinoa ennustaa, kuinka kauan uteliaisuus menee tai mikä odottamaton tapahtuma saattaa päättää tehtävän.
Peto
Onko Curiositylla persoonallisuus, kuten aikaisemmilla Marsin kulkijoilla?
"Itse asiassa ei, emme näytä antropomorfisoivan tätä roveria kuten ihmiset tekivät Hengellä ja Mahdollisuuksilla", Vasavada sanoi. ”Emme ole sitoutuneet siihen emotionaalisesti. Sosiologit ovat todellakin tutkineet tätä. " Hän pudisti päätään huvitulla hymyllä.
Vasavada ilmoitti, että sillä voi olla jotain tekemistä Curiosityn koon kanssa.
"Mielestäni se on jättiläinen peto", hän sanoi suorapuheisesti. "Mutta ei millään tavalla."

Vasavada totesi, että tämän tehtävän luonnehtimiseen kuuluu sen monimutkaisuus kaikissa ulottuvuuksissa: inhimillinen osa saada 500 ihmistä työskentelemään ja tekemään yhteistyötä optimoimalla kaikkien kyvyt; roverin pitäminen turvallisena ja terveenä; ja pitämällä kymmenen soitinta päivittäin, jotka tekevät joskus täysin toisiinsa liittymättömiä tieteellisiä tehtäviä.
"Jokainen päivä on oma pieni" seitsemän minuutin kauhumme ", jossa niin monien asioiden on mentävä oikein joka päivä", Vasavada sanoi. ”Mahdollisia ongelmia ja vuorovaikutuksia on miljoona, ja sinun on mietittävä jatkuvasti kaikkia tapoja, joilla asiat voivat mennä pieleen, koska on olemassa miljoona tapaa sotkea. Se on monimutkainen tanssi, mutta onneksi meillä on loistava joukkue. "
Sitten hän lisäsi hymyillen: "Tämä tehtävä on kuitenkin jännittävä, vaikka se olisi peto."
Page Street Publishing -yrityksen, Macmillanin tytäryhtiön, julkaisema ”Uskomaton tarina avaruudesta: Kohtauksen takaa katsaus tehtäviin, jotka muuttavat näkemystämme kosmosta”.