Yhdistetty yhdysvaltalaisten ja kanadalaisten insinöörien ryhmä on ottanut suuren askeleen eteenpäin soveltamalla menestyksekkäästi kansainväliseen avaruusasemalle (ISS) tehtyä uutta omaa tyyppistä robotiikan tutkimusta korkea-arvoisten kiertoradalla olevien kiertoradalla olevien satelliittien korjaamiseen ja tankkaamiseen. , ja jolla on potentiaalia yhteen päivään mennessä, säästää miljardeja dollareita hallitukselle ja liiketiloille.
Iloiset tutkijat molemmista maista huusivat "Kyllä !!!" - onnistuneesti käyttäessäsi robotti tankkausoperaatiota (RRM), joka on ruuvattu ISS: n ulkopuolelle, tekniikan koepenkiksi osoittaaksesi, että kauko-ohjattava robotti avaruuden tyhjiössä pystyisi suorittamaan herkkiä työtehtäviä, jotka vaativat erittäin tarkkaa liikkeenhallintaa. Vallankumouksellinen robotiikkakoe voisi pidentää jo maapallon kiertoradalla olevien satelliittien käyttöikää, joiden ei koskaan ollut edes tarkoitettu käytettäväksi.
"Sen jälkeen kun olen viettänyt useita kuukausia ammatillista ja henkilökohtaista aikaa RRM: lle, se oli minulle suuri emotionaalinen kiire ja vakuutus siitä, että näin ensimmäisen videovirran RRM-työkalusta", sanoi Justin Cassidy yksinoikeudella perusteellisessa haastattelussa Space Magazine -lehden kanssa. Cassidy on RRM-laitteistopäällikkö NASA: n Goddard-avaruuslentokeskuksessa Greenbeltissä, Marylandissa.

Ja RRM-tiimi aikoo jo toteuttaa entistä kunnianhimoisempia kokeita, jotka alkavat heti kesästä lukien, mukaan lukien erittäin odotettu nestesiirto simuloidakseen todellista satelliittitankkausta, joka voisi muuttaa robottisovelluksia avaruudessa - katso yksityiskohdat alla!
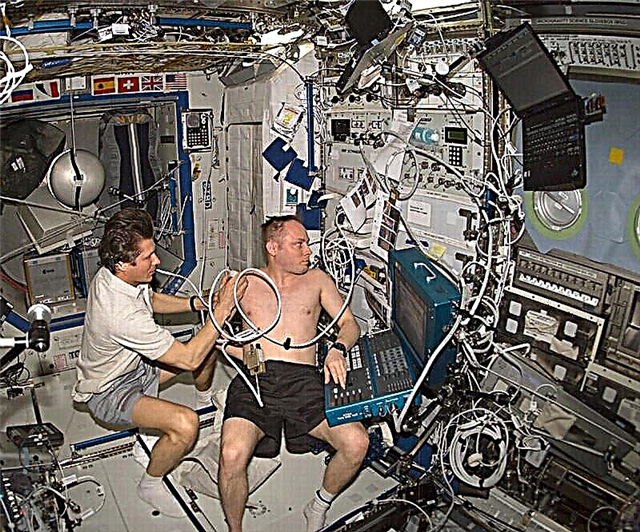
Kaikkia aseman robottioperaatioita ohjasi etäohjauksen avulla lennonjohtaja. Kauko-ohjauksen ja robotiikan tarkoituksena on vapauttaa ISS-miehistö, jotta he voivat työskennellä muissa tärkeissä tehtävissä ja suorittaa tieteellisiä kokeita, jotka edellyttävät paikan päällä tapahtuvaa ihmisen ajattelua ja puuttumista.

Kolmen päivän ajanjaksolla 7.-9. Maaliskuuta insinöörit suorittivat yhteisiä operaatioita NASA: n robotti tankkaus Mission (RRM) -kokeen ja Kanadan avaruusjärjestön (CSA) robotti-“handyman” - Dextre-robotin välillä. Dextre on virallisesti nimeltään SPDM tai Special Purpose Dexterous Manipulator.
Ensimmäisenä päivänä robottioperaattorit maan päällä kauko-ohjasivat 12 metriä pitkän (3,7 metriä) Dextre-“käsimiehen” RRM-kokeeseen avaruusaseman Kanadan rakentaman robottivarren (SSRMS) avulla.
Dextren ”käsi” - joka tunnetaan teknisesti nimellä ”OTCM” - tarttui ja tarkisti sitten kolme erilaista erikoistunutta satelliittityökalua, jotka sijaitsivat RRM-yksikön sisällä. Turvakorkkityökalun, lankaleikkurin ja huovan manipulointityökalun sekä monitoimilaitteen kattava mekaaninen ja sähköinen arviointi havaitsi, että kaikki kolme työkalua toimivat moitteettomasti.

”Ryhmämme lukitsivat mekaanisesti kanadalaisen“ Dextre ”-robotin“ käden ”RRM Safety Cap -työkaluun (SCT). RRM SCT on ensimmäinen kiertoradalla oleva yksikkö, joka käyttää Dextre OTCM -käden videoominaisuuksia ”, Cassidy selitti.
”Työkalutoiminnan alussa operaation ohjaimet ajoivat mekaanisesti OTCM: n sähkönavan eteenpäin yhdistääkseen sen SCT: n kiinteään elektroniikkalaatikkoon. Kun virta käytettiin tähän käyttöliittymään, tiimimme pystyi näkemään, että Goddardin suuret televisiot -televisiot - SCT: n ”ensimmäinen kevyt” video osoitti laukauksen työkalusta RRM-säilytyspaikan alueella (katso kuva).

"Tiimimme puhkesi huutamaan" Joo! " kiittää tätä onnistunutta sähköisen toimintajärjestelmän tarkistusta. "
Sitten Dextre suoritti erilaisia tehtäviä, joiden tarkoituksena oli testata, kuinka hyvin erilaisia edustavia kaasuliittimiä, venttiilejä, johtimia ja tiivisteitä voidaan käyttää RRM-moduulin ulkopuolella. Se vapautti turvakäynnistyslukot ja katkoi huolellisesti kaksi erittäin ohutta satelliittilukkolankaa - terästä -, joiden halkaisija oli vain 20 tuhatta tuumaa (0,5 millimetriä).
”Langankatkaisutapahtuma oli vain muutaman minuutin. Mutta molemmat langankatkaisutehtävät kestivät noin 6 tuntia koordinoitua, turvallista robottioperaatiota. Lukkolanka oli johdettu, kierretty ja sidottu maahan ympäristön suojuksen ja T-venttiilin rajapinnalla ennen lentoa ”, Cassidy kertoi.
Tämä RRM-harjoitus on ensimmäinen kerta, kun Dextre-robottia käytettiin ISS-tekniikan tutkimus- ja kehitysprojektiin, mikä merkittävästi laajentaa sen kykyjä kuin massiivisen kiertävän etupostin robottihuolto.
Videon kuvateksti: Dextren robotti tankkausoperaatio: Päivä 2. Dextren vaativimman tehtävän toinen päivä päättyi onnistuneesti 8. maaliskuuta 2012, kun robotti-ohjaaja suoritti kolme tehtäväänsä. Luotto: NASA / CSA

Kaikkien kolmen päivän operaatio kesti noin 43 tuntia ja eteni jonkin verran odotettua nopeammin, koska ne olivat niin lähellä nimellisarvoa kuin voidaan odottaa.
"Päivät 1 ja 2 kestivät noin 18 tuntia", sanoi NASA Goddardin RRM-operaatioiden johtaja / järjestelmäinsinööri Charles Bacon Space Magazinelle. Päivä 3 juoksi noin 7 tuntia, koska olimme suorittaneet kaikki tehtävät aikaisin. Kaikki kolme päivää lähtökohtana olivat 18 tuntia, ja joukkue työskenteli kahdessa vuorossa. Joten aika oli odotetusti, ja oikeastaan hiukan parempi, koska valmistuimme aikaisin viimeisenä päivänä. ”

"Jo usean viime kuukauden ajan joukkueemme on asettanut aluetta RRM: n kiertoradan demonstraatioille", Cassidy kertoi minulle. "Aivan kuten teatterituotanto, kulissien takana on monia insinöörejä, jotka ovat tarjonneet kehitystukea ja ovat edelleen osa kiertoradan RRM-toimintaa."
”Jokaisessa RRM-vaiheessa - valmistelusta, toimittamisesta, asennuksesta ja nyt toiminnoista lähtien - olen hämmästynyt valtavista ponnisteluista, joita monet erilaiset ryhmät ovat osallistuneet RRM: n toteuttamiseen. NASA: n Goddard-avaruuslentokeskuksen satelliittipalvelutoimisto ryhtyi Johnson Space Centerin, Kennedyn avaruuskeskuksen (KSC), Marshall Space Flight Centerin ja Kanadan avaruusjärjestön ohjauskeskuksen kanssa St. Hubertiin, Quebeciin, jotta RRM: stä tulisi todellisuus. "
"RRM-operaatioiden menestys tähän mennessä kansainvälisellä avaruusasemalla (ISS) Dextren avulla on osoitus NASA: n monien organisaatioiden ja yhteistyökumppaneiden erinomaisuudesta", Cassidy selitti.
Kolmen päivän "kaasuliittimien poistotehtävä" oli ensimmäinen simulaatio tekniikoiden harjoittamiseen, jotka ovat välttämättömiä virheellisten satelliittien robottivahvistamiselle ja muuten nimellisesti toimivien satelliittien tankkaamiselle, jotta niiden suoritusikää toivottavasti pidennetään useiksi vuosiksi.
Maalla toimivat teknikot lataavat liitososat ja venttiilit kaikki välttämättömät nesteet, kaasut ja polttoaineet satelliittien varastosäiliöihin ennen laukaisua ja jotka sitten suljetaan, peitetään ja joihin normaalisti ei enää koskaan pääse.
"Avaruusaseman vaikutusta hyödylliseksi teknologiatestausvuodeksi ei voida yliarvioida", sanoo NASA: n Goddardin avaruuslentokeskuksen (NBS Goddard Space Flight Center) apulaisjohtaja Frank Cepollina, joka työskentelee Greenbeltissä, Md.
”Tuoreet satelliittipalveluiden tekniikat esitellään todellisessa avaruusympäristössä kuukausien sijasta vuosien sijasta. Tämä on valtava. Se edustaa todellista edistystä avaruustekniikan kehityksessä. ”
Neljä uutta tulevaa RRM-koetta, jotka on alustavasti asetettu tälle vuodelle, osoittavat kauko-ohjattavan robotin kyvyn poistaa esteitä ja tankata tyhjiä satelliittikaasusäiliöitä avaruudessa, mikä säästää kalliita laitteita ennenaikaisesta liittymisestä kiertoradan roskakoriin.
Tulevien RRM-operaatioiden aikataulu voi olla haastava ja riippuu Dextren ja SSRMS-varren saatavuudesta, jotka on myös varattu voimakkaasti monille muille meneillään oleville ISS-operaatioille, kuten avaruuskävelyille, kunnossapitotoimille ja tieteellisille kokeille, samoin kuin tasaisen laiturin kiinnittämiseen ja / tai purkamiseen. virta kriittisiä rahtitoimitusaluksia, kuten Progress, ATV, HTV, Dragon ja Cygnus.
Joustavuus on avain kaikkiin ISS-toimintoihin. Ja vaikka aseman miehistö ei ole mukana RRM: ssä, heidän toiminta saattaa olla.
"Vaikka miehistö ei itse luota Dextreen toimintaan, Dextre-operaatiot voivat epäsuorasti vaikuttaa siihen, mitä miehistö voi tai ei voida tehdä", Bacon kertoi minulle. "Esimerkiksi RRM-operaatioidemme aikana miehistö ei voi suorittaa tiettyjä fyysisiä harjoituksia, koska kyseinen liike voi vaikuttaa Dextren liikkeeseen."
Tässä on luettelo tulevista RRM-operaatioista - odotettavissa olevat ISS-aikataulurajoitukset:
* Tankkaus (kesä 2012) - Kun Dextre avaa polttoaineventtiilin, joka on samanlainen kuin nykyään satelliiteissa yleisesti käytetty, se siirtää nestemäistä etanolia siihen hienostuneen robottipolttoaineletkun kautta.
* Terminen huovan manipulointi (TBD 2012) - Dextre harjoittelee leikkaamalla lämpöhuovan teippiä ja taittamalla lämpöhuovan paljastamaan alla olevan sisällön.
* Ruuvin (kiinnittimen) poisto (TBD 2012) - Dextre avaa satelliittipultit (kiinnittimet) robottisesti.
* Sähkösuojuksen poistaminen (TBD 2012) - Dextre poistaa korkit, jotka tyypillisesti peittävät satelliitin sähköliittimen.
RRM kuljetettiin kiertoradalle Space Shuttle Atlantis -laivan tavaratilan sisällä heinäkuun 2011 aikana NASA: n kolmen vuosikymmenen pituisen sukkulaohjelman viimeisessä sukkulamatkalla (STS-135), ja sitten avaruuskävely astronautit asensivat sen ulkoiselle työtasolle ISS: n selkärankaan. Hanke on NASA: n ja CSA: n yhteinen työ.
”Tässä menestys on kyse. RRM: n avulla me todella valmistamme tietä tulevalle robottien etsinnälle ja satelliittihuollolle ”, Cassidy totesi.

…….
24. maaliskuuta (la): Ken Kremerin ilmainen luento New Jerseyn tähtitieteellisessä yhdistyksessä, Voorhees State Park, NJ klo 20.30. Aihe: Atlantis, America's Shuttle -ohjelma, RRM, Orion, SpaceX, CST-100 ja NASA: n tulevaisuus ihmisten ja robottien avaruuslennoista